
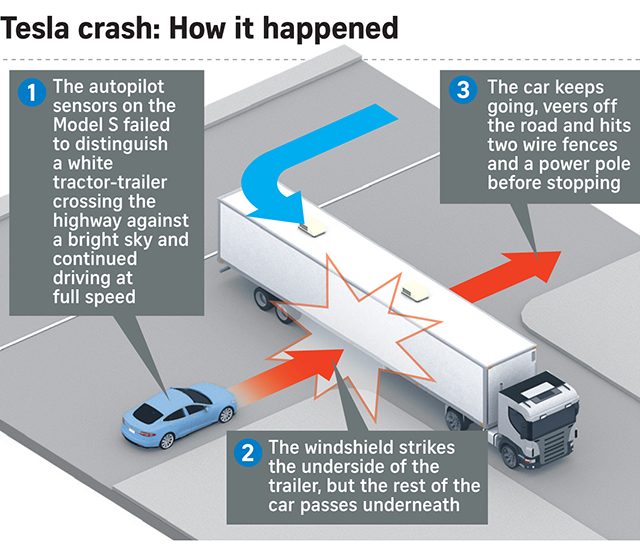
Hace unos días apareció en todos los medios el primer accidente mortal de un vehículo conducido por un ordenador. Por un lado es la primera víctima mortal y por otro lado las investigaciones apuntan a un fallo del ordenador.
 Este tema ya fue tratado en un artículo de este mismo blog y este hecho viene a reafirmar nuestra opinión: La conducción autónoma solo es posible en entornos controlados. Las carreteras se deben modificar para facilitar la conducción autónoma y los conductores humanos no pueden convivir con los cibernéticos.
Este tema ya fue tratado en un artículo de este mismo blog y este hecho viene a reafirmar nuestra opinión: La conducción autónoma solo es posible en entornos controlados. Las carreteras se deben modificar para facilitar la conducción autónoma y los conductores humanos no pueden convivir con los cibernéticos.
Veamos dos casos reales para ilustrar esta idea.
- Los trenes de alta velocidad circulan casi autonomamente a más de 200 Km/h. Para ello la vía tiene desplegados sistemas como GSM-R o ERTMS que se encarga de controlar donde están todos los trenes, que van a la velocidad adecuada y que no cae ningún objeto a la vía.
- También muchos aviones comerciales tienen un sistema para aterrizar autonomamente sin la intervención del piloto. Este sistema se utiliza en situaciones de niebla cerrada en la que es imposible ver la pista de aterrizaje. Para que este sistema sea utilizado es necesario que el aeropuerto tenga desplegados los sistemas y balizas adecuados para ayudar al avión a aterrizar totalmente a ciegas.
Aun en estos entornos totalmente controlados puede haber problemas. Ha habido algunos accidentes de trenes de alta velocidad y el sistema de aterrizaje autónomo solo se utiliza como alternativa al piloto cuando no hay ninguna visibilidad. ¿Qué podemos esperar de un entorno totalmente incontrolado como son las carreteras actuales?
Tanto Google como Tesla se salvaguardan diciendo que no es una conducción autónoma si no una conducción muy asistida y que el conductor tiene que seguir atento. Es como si le dejamos nuestro coche a un conductor algo inexperto y, en un momento crítico, nos dice que cojamos el volante. Esta afirmación no es realista. El conductor tiene que tener claro qué es lo que hace la máquina y que es lo que tiene que hacer el conductor. Lo que haga la máquina tiene que ser 100% seguro.
En muchas ciudades, en las autopistas de entrada y salida, suelen haber carriles especiales en las que la circulación está restringida a ciertos vehículos: Más de un ocupante, solo transporte público, etc. Además suele ser un carril reversible y su sentido cambia dependiendo de la hora del día para dar más capacidad al sentido que soporta más tráfico. Estos carriles suelen estar perfectamente señalizados y controlados por cámaras.
 Sería realmente sencillo añadir sistemas de ayuda a la conducción autonoma. Además se puede restringir la circulación de vehículos que pudieran resultar conflictivos. El riesgo en estos tramos sería prácticamente nulo y el conductor podría relajarse totalmente. Una vez demostrado la fiabilidad en estos entornos es seguro que este tipo de carriles especiales se multiplicarían en otras autopistas o carreteras. Una vez validado el conjunto sistemas de ayuda y software de conducción autonoma, en una nueva carretera, se tendría la seguridad garantizada.
Sería realmente sencillo añadir sistemas de ayuda a la conducción autonoma. Además se puede restringir la circulación de vehículos que pudieran resultar conflictivos. El riesgo en estos tramos sería prácticamente nulo y el conductor podría relajarse totalmente. Una vez demostrado la fiabilidad en estos entornos es seguro que este tipo de carriles especiales se multiplicarían en otras autopistas o carreteras. Una vez validado el conjunto sistemas de ayuda y software de conducción autonoma, en una nueva carretera, se tendría la seguridad garantizada.
Nuestra opinión es que un software de conducción autonoma valido para cualquier carretera o autopista nunca funcionará. Es imposible recoger en un software todas las posibilidades de tipos de carretera, señalización, acciones humanas, posibles peligros, etc. Además , ni siquiera los buenos conductores tienen la misma manera de actual ante el mismo problema de circulación.





